



服务热线
027-59880803

INPHO 软件 UASMaster:远程驾驶飞机系统(RPAS)/无人机系统(UAS)的摄影测量级处理。对于全面处理无人机系统(UAS)捕获的数据而言,UASMaster是一个恰好的工具。UASMaster把易用性与功能全面又强大的摄影测量工作站相结合。
结合在单一产品中的完整摄影测量工作流
快速黑匣子处理
处理任何类型无人机的数据
多相机支持(高达4000万像素的相机)
不需要专门的摄影测量知识或经验,即可获得完美结果

对于全面处理无人机系统(UAS)捕获的数据而言,UASMaster是一个恰好的工具。UASMaster把易用性与功能全面又强大的摄影测量工作站相结合。
该软件在非摄影测量员简单的接近黑匣子工作流和摄影测量专家的工作流之间架起了桥梁,填补了他们之间的空缺。UASMaster包括先进的技术,这种技术经过定制,能从UAS的数据特性中给出高质量的结果。它容易整合进Inpho摄影测量世界和第三方工作流中。
UASMaster具有开放市场的理念,几乎能处理任何UAS硬件卖家的数据。它可以使用从固定翼类型以及直升机类型的系统中获得的数据。该软件甚至用于测量气球和其它类型的无人机系统,也证明是成功的。
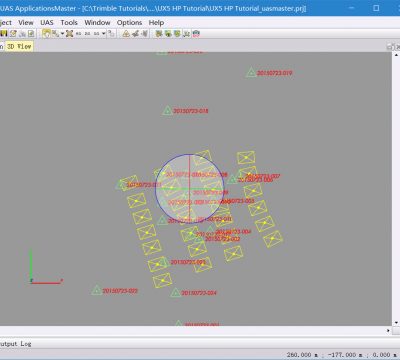
工作流 | • 全自动地理参考、相机标定、点云匹配和正射镶嵌 • 基于当地多边形,对地理参考、点云和正射镶嵌进行编辑和再处理 • 摄影测量级处理 • 任务跟踪监视 • 多次飞行和多个相机能力 • 输入到eCognition自动特征提取中,获得较佳结果 |
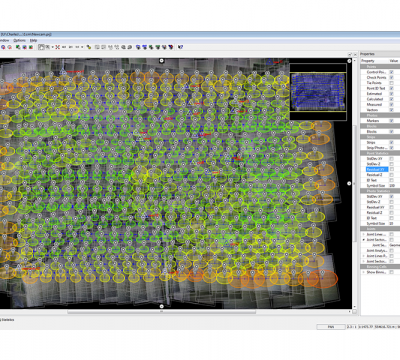
地理参考 | • 自动错误删除,以确保高质量 • 通过图形分析工具和详细报告,用预定义的投影实现强大的数据转换。 • 自动进行相对和绝对平差 • 有效连接点也可在纹理不良的区域以及山区进行匹配 • 具有正确拓扑结构的项目范围影像显示和自动影像选择,用于互动的指导控制点测量 • 强大直观的图块分析仪: –– 简单的大型数据集可视化检查 –– 可视化 –– 影像脚点 –– 重叠 –– 地面控制和连接点 –– 点和影像连接 –– 残差 –– 误差椭圆 –– 点和影像的几何区分析 –– 点密度/连接性的合并单元分析 –– 有用的显示过滤器,例如多航条连接等等 –– 统计数据表直接链接到图形 |
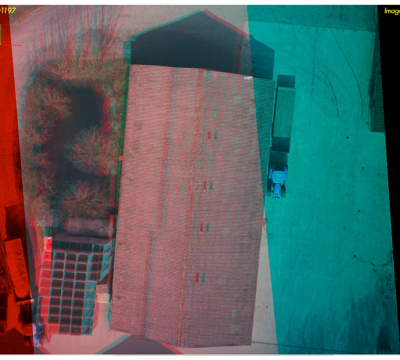
点云和高度数据 | • 彩色点云和表面网格以及裸地DTM输出 • 点云的有效噪声过滤 • 精密的点云过滤和分类,比如地面与非地面的分离点 • 立体和单视场的编辑和可视化 • 带平视显示屏的情景驱动编辑工具 • 严格考虑和测量形态数据,比如断线 • 类似CAD的多层编辑和可视化 • 等高线和高度的实时动态编码 • 自动较佳拟合立体模型选择,用于立体显示和编辑 |
正射影像处理 | • 基于接缝查找和色彩平衡的自动特征用在Trimble专有OrthoVista技术的正射镶嵌中,可产生完美的无缝镶嵌 • 根据影像纹理分析,把正射自适应地混合到镶嵌中 • 精确的真正射(基于表面模式)和经典的正射(基于裸地DTM)策略,随时可用于GIS • 支持已有的高度模形用于快速处理 |
益处 | • 每个影像仅在短短几秒钟内就能得到准确、可靠的结果,具有高度自动化处理过程 • 设计完美的匹配策略,可对连接点获得大的射线连接,并且获得高质量点云或镶嵌图 • 为项目设置和数据后处理,最小化用户的参与 • 与摄影测量专业工具相结合,使用轻松 |
选项 | • 按月租用 • MATCH-AT版本的更新 • 包括支持和版本更新的维护 • 黑匣子工作流选项 • 支持GNSS和地面控制点的选项 • 也可与Trimble UX5硬件捆绑 • 可选的彩色立体影像用于标准的非3D功能监测 • 用Trimble eCognition进行自动特征提取 • 通过连接Summit Evolution,可直接把立体三维视图映射到CAD和GIS中 |
系统需求 | • 多核电脑工作站 • 8 GB RAM • 大容量磁盘系统 • Windows 7,64 位 • 用于先进立体点测量的专用硬件: –– 带立体声的显卡支持OpenGL四方体立体缓存(例如:Nvidia Quadro系列) –– 立体查看系统 |
性能 | • 地理参考:每幅影像10秒钟 • 点云匹配:每幅影像3秒钟 • 正射镶嵌:每幅影像4秒钟 • 再投影误差一般小于1个像素 • 高度精度大约1-2个像素 • 限于6000幅照片和影像,可达4000万像素支持的硬件 • 对任意无人机硬件开放,直升机类型或固定翼类型开放: –– 对任意品牌开放 –– 对多转子平台开放 –– 对固定翼平台开放 –– 进行过测量气球测试 • 支持专业的3D硬件,如3D光标 |
支持的格式 | • 支持的图像格式: –– 地理参考正射:GeoTIFF、TiffWorld(tfw) –– TIFF、JPG、BigTiff –– JPEG2000、TIFFjpeg • 点云操作: –– 输入格式:LAS (1.2-1.4)、XYZ、BXYZ、WNP、SHP、DXF • 与来自Inpho系统的摄影测量模块兼容 |
现代计算机视觉算法与已证明的先进摄影测量技术相结合,用最少的人工参与,自动产生精确的结果:
• 适合摄影测量新手的直观指导工作流概念,完美地整合到任何摄影测量工作流程中。
• 用于地理参考和点云的交互式上下文驱动自动编辑功能,包括形态数据创建(如断线测量)、分类、过滤等等。
• 对所有固定翼、直升机类型或其它无人机硬件开放。为支持GPS的无人机优化了技术(建议精度为±10 m)
• 与Trimble的Inpho摄影测量模块完全兼容