










服务热线
027-59880803



四维深时三维激光扫描方案包含空间采集、空间编辑、空间发布三大模块,从采集、重构、编辑到浏览,为客户提供完整、专业的实景空间三维数字化解决方案。
当四维深时完成点云采集后,数据将上传至云端,将通过其独有的A/算法进行空间重构,计算结果可在系统中进行数据集校准、热点互动、地理注册等自主编辑。支持无缝导入AUtOCAD等专业软件,轻松应对海量点云数据,还可通过网络对数据进行发布共享,随时随地可在PC端、移动端中查看三维成果。

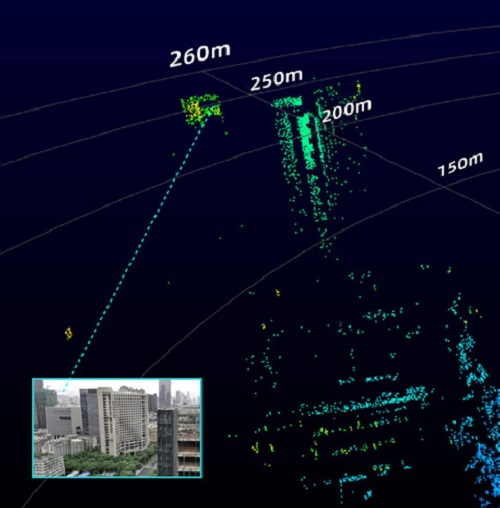
 | 建模范围最远达260m 在硬件上,四维深时配备三个905nm激光雷达三个不同角度的激光雷达,构造出水平360°、垂直267°的采集视场角,使得单站建模范围最远达到260m。 |
| AI算法智能后处理 全自动无需人工干预,基于核心自研算法科技,实现自动化、智能化三维数字建模,完全摒除人工操作的繁琐,并且避免成果“因人而异” |
 | 单站800万个点云数据 三个多层LiDAR传感器采集3D测量数据并结合行业领先的激光定位算法,生成测绘级质量点云精度达到士1cm。 |  | 5大编辑板块 创造更多三维空间互动方式,三维空间计算结果可在四维深时编辑系统的“数据集、热点、测量、平面图、坐标”的五大常用编辑模块进行自主编辑,创造更具传播价值的数字李生空间。 |
 | 16K高清实景图像 除了高精度点云数据,四维深时输出的图像质量也得到了飞跃式提升,高清鱼眼镜头可全方位采集高分辨率画面,综合输出高达16K的高清实景图像。 |  | 一键操作、易学易用 零基础用户无需专业,培训即可使用,一键极速扫描,设备自动旋转360°后完成单站采集即扫即走。 |
 | 30秒高速单站采集 四维深时凭借其特有的结构设计,在采集速度方面有明显的优势,仅需30秒即可完成单站的数据采集。 | ||
行业应用 | |||
| 建筑BIM 四维深时操作简单,无测量相关知识的BIM工程师也可以轻松完成数据采集,同时实现了一键式点云处理,并支持与AutoCAD等建筑BIM相关的专业软件进行无缝对接为建筑BIM提供全生命周期的三维测量解决方案。 | ||
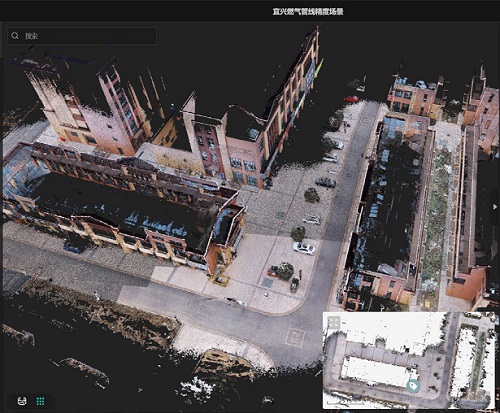
| 测绘勘察 随着实景三维中国建设的实施和推进,对城市级部件级三维数据采集需求与日俱增,对这类空间的数字化、信息化、智能化正是传统勘测测绘的发展方向。四维深时无需任何定位基础设施即可实现高精度三维场景连续、自动、快速地精确数据采集,助力实景三维中国建设。 | ||
| 文旅文博 以文物保护、文化传播为目的的测绘要求准确地反映历史建筑的现状,包括残损、构件错置、改动、变形等情况。四维深时采用高精度逆向三维建模及重构技术,快速获取大型实体或实景目标的三维立体信息通过独有算法重构其3D数据模型,再现客观事物实时、动态、真实特性。 | ||
| 消防刑侦 在刑侦、消防、应急等公共安全事务中,四维深时可快速获取清晰的实景影像和精准的三维空间信息,真实、全方位还原现场,并提供高精度的三维空间位置信息。通过本地化部署,将现场数据分享到整个政务系统中,所有相关人员都可通过网络查看分享现场数据,为案件回溯分析、汇报提供直观依据。 | ||
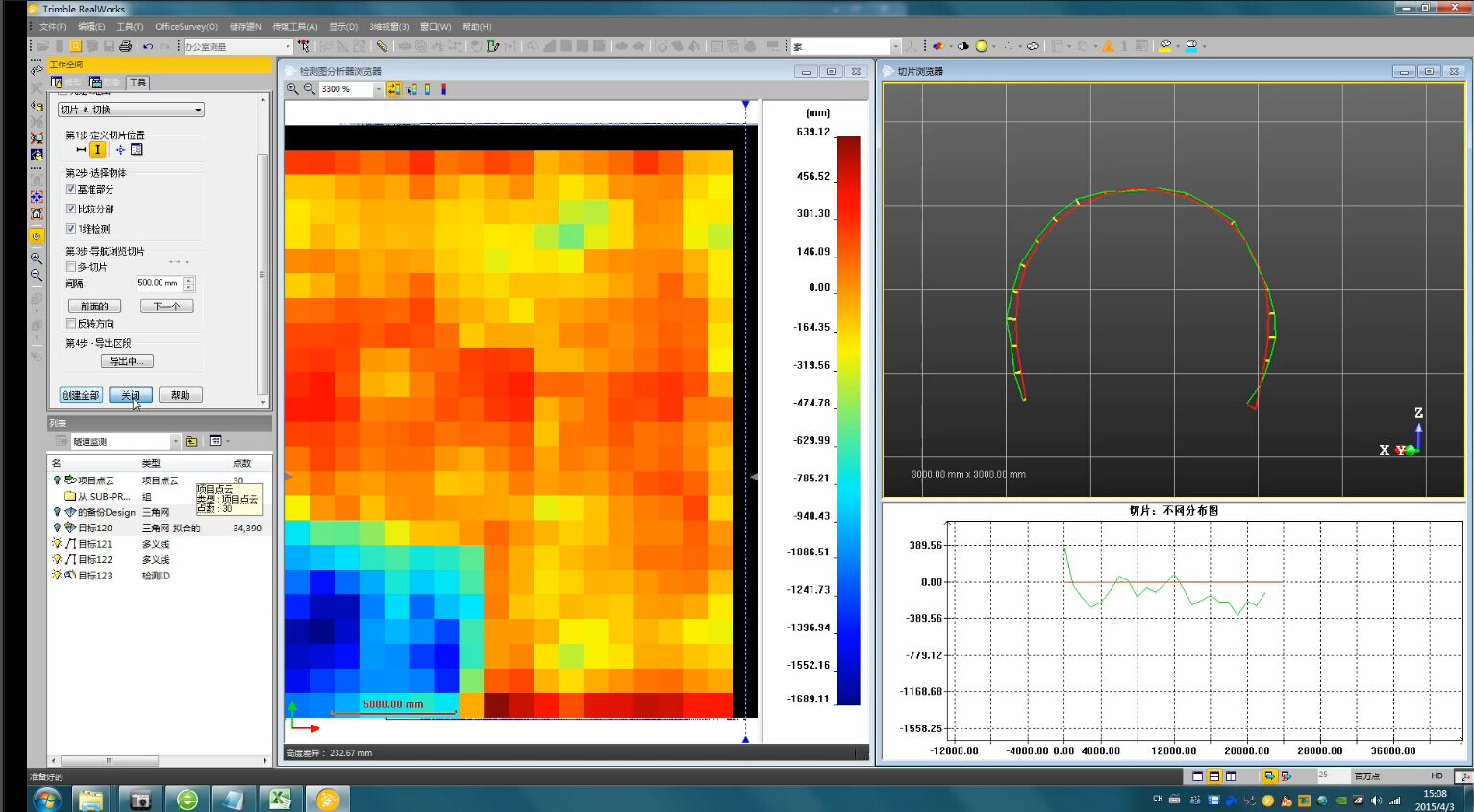
| 地下空间 地下空间是涉及城市安全有序运行的重要部分。四维深时可对城市地下空间进行快速采集,所见即所得,一次采集数据可多次复用,特别是针对燃气管线、输油气场站、城市供排水、地下停车场、人防工程等场景的可视化数据需求可提供全面解决方案。 | ||
技术参数 | |||
设备类型 | 架站式三维激光扫描仪 | ||
| 操作方式 | 移动端 | ||
激光安全等级 | 1级(IEC60825-1:2014)人眼安全 | ||
扫描距离 | 0.6m~260m | ||
扫描速度 | 300,000 pts/s(单回波) 600,000 pts/s(双回波) | ||
视场角 | 水平: 360°、垂直: 267° | ||
| 激光雷达 | 数量 | 3个多层 LiDAR | |
波长 | 905nm | ||
精度 | 1σ (@20m)≤1cm(在环境温度为 25°C、目标物体反射率为 80% 并置于 20 米外的条件下测得) 1σ (@0.2~1m)≤2cm(在环境度为 25°C、目标物体距离为0.2-1m,反射率为 30% 时测得) | ||
点云密度 | 1cm | ||
输出点云格式 | .las 、.ply | ||
| HDR相机分辨率 | 单镜头 | 5472 x 3648 | |
全景图 | 16384 x 8192 | ||
| 摄像头 | 数量 | 1个高清摄像头 | |
画质 | 16K | ||
| 传感器 | 数量 | 4个光线传感器 | |
定位系统 | GPS/北斗 | ||
输出数据 | 点云和高清全景图像 | ||
数据查看方式 | 在线浏览,支持导入AutoCAD及其他第三方软件 | ||
储存 | 内置64G 云端存储 | ||
WiFi | 802.11a/b/g/n网络协议 支持2.4/5GHz通信 | ||
外观与尺寸 | 312.5mm*315.5mm*146.5mm(收纳状态)/总重量为6.75kg(包括电池) | ||
电池 | 续航: 4小时/可更换电池 | ||
工作温度 | -10°C~+50°C | ||